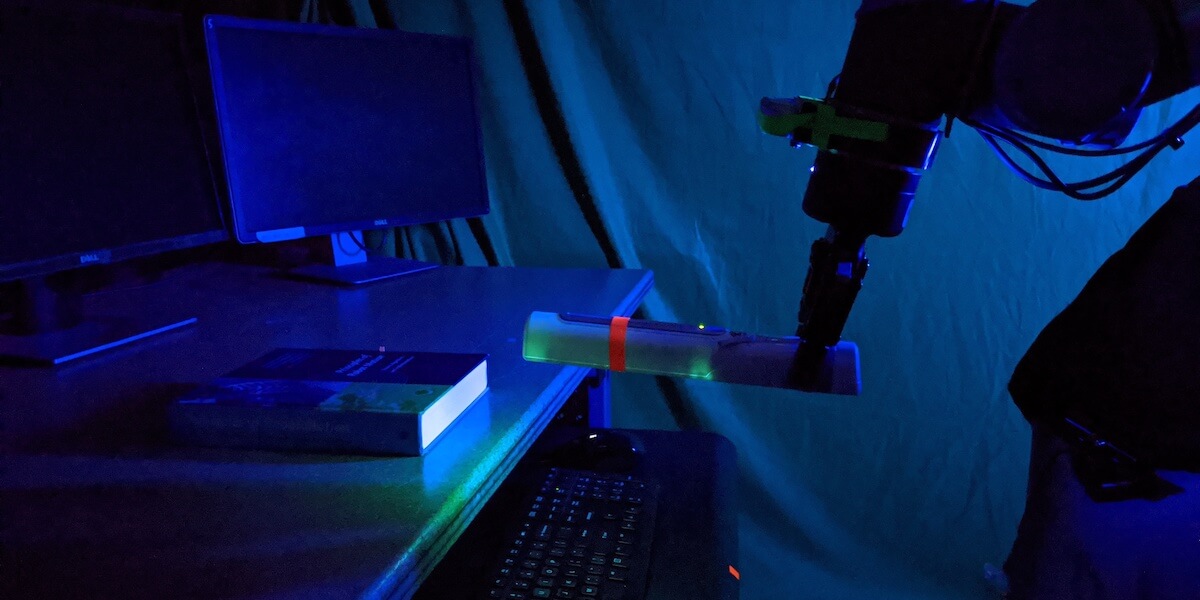
A robot uses UV disinfection tools to clean an office set up at the USC Viterbi Center for Advanced Manufacturing. PHOTO/SARAH AL-HUSSAINI.
In 2017, a team of USC Viterbi researchers created ADAMMS (Agile Dexterous Autonomous Mobile Manipulation System), a robot designed to support repetitive human tasks, like transporting equipment or tending a 3-D printer at 3 a.m. ADAMMS can perform specific actions like opening doors or picking up objects autonomously. These researchers, including postdoctoral researcher in the USC Viterbi Department of Aerospace and Mechanical Engineering Pradeep Rajendran, AME Ph.D student Shantanu Thakar, Department of Computer Science master’s student Hyojeong Kim and M.S. AME’18 Vivek Annem, envisioned a tool that could support humans remotely.
Three years later, in the throes of a global pandemic, Thakar and his team wondered if they could adapt ADAMMS to help reduce spread of infection using UV light as a disinfection tool. “We already have a robot that can reach into drawers or under a keyboard,” Thakar said. “Why not use it to help?”
The team began its work by interviewing Andrea Armani, Ray Irani Chair in Engineering and Materials Sciences and professor of chemical engineering and materials science, to confirm UV light is a viable solution to kill the COVID-19 virus. Working under Smith International Professor of Mechanical Engineering and Computer Science and Director of the USC Viterbi Center for Advanced Manufacturing SK Gupta, the team grew to include: AME Ph.D. student Rishi Malhan, AME master’s student Omey Manyar, AME post-doctoral researcher Ariyan Kabir, students in the Department of Computer Science including master’s students Alec Kanyuck, Rex Jomy Joseph and Ph.D. Sarah Al-Hussaini and Brual C. Shah, a research scientist at the USC Viterbi Center for Advanced Manufacturing (CAM). Together, they launched ADAMMS-UV.
“We saw robots with mobile bases that could move around, but they were limited to disinfecting larger surfaces,” Malhan said. But in order to be able to move or manipulate objects and disinfect smaller spaces, like a coffee mug or a keyboard, Malhan said a robotic arm was needed. The resulting technology helped bridge the gap from bigger generic spaces to smaller, more customized areas, using both a UV tower and a UV wand.
The robotic arm the team uses has six joints, which allows it to be fairly flexible. At the same time, this makes it more difficult for a user to manually operate it, necessitating algorithms guiding its motion as a more efficient solution to path planning.
“Trained humans that can perform disinfection are a scarce resource at this time of crisis. We need disinfection methods to ensure that humans remain safe during the operation and the highest level of task completion quality can be ensured,” Gupta said.
Said Jeremy Marvel, a computer scientist at the National Institute of Standards and Technology (NIST), which funded the original ADAMMS project: “The research team led by Dr. Gupta has accomplished an impressive feat by adapting next-generation robot technologies—originally developed for manufacturing applications—to a task that directly and effectively addresses the current health situation. The technologies they have developed are specifically aimed at enabling operators to work quickly and efficiently. This is particularly important in modern society, where emerging technologies need to be repurposed and deployed in a relatively short timeframe.”
Adapting ADAMMS
Putting together the UV disinfection components with the already-built ADAMMS meant the team could fast track a potential solution to disinfection challenges, leveraging years of research at a pivotal moment when quick action is more crucial than ever. Of course, in the middle of a pandemic, other challenges existed.
While the team only needed a few additional materials to adapt the original ADAMMS for UV disinfection—all they needed were a few 3-D printed parts and UV components—safety was a critical concern. Adhering to new social distancing and USC campus safety standards—including a mandate that research labs only remain open to those working on COVID-19—the team staggered its work.
Aided by Zoom planning sessions, the team completed plans together and then worked individually on separate modules. The USC Viterbi Center for Advanced Manufacturing (CAM) housed the robot; only three members of the team—Al-Hussaini, Kim and Rajendran—visited it in person. Effectively, one person could man the robot while the other worked remotely from a different room in CAM to input high-level directives into the robot.
“Since the robot is remotely operated, it’s well suited for stringent times like those we are now facing,” Al-Hussaini said.
Remote and Autonomous
ADAMMS requires both a frontend and a backend component, much like any computer. On the frontend, a high-level directive like “Clean this area,” is communicated.
Rajendran said: “Humans have a keen eye for detail, so they provide the idea of which areas to disinfect.”
On the backend, path planning algorithms developed by the researchers help the robot decide specifically which path to take in reaching the object and the exact scanning pattern used for disinfection.
Kim, who worked on several individual modules which she integrated and implemented on the real robot, said: “Once the robot is in the desired space, the robot arm will scan the space to get a sense of what it’s surrounded by.” The user will receive this scan as a 3-D image, Kim said. “The user can click on a few objects it wishes to sanitize and the robot will generate the trajectory to cover all the areas.”
Requirements and Limitations of UV
The researchers said for UV light to work effectively as a disinfectant, the surface in question must be exposed to the light for a specific period of time. The exact time period is based on the intensity of the UV light, mainly, and the type of surface you are dealing with. “As we gather data in this area, we will input it so that the robot can plan accordingly.” Al-Hussaini said.
Of note are limitations that exist for UV disinfection, for instance, fabrics or textured surfaces, which would be better treated by chemical disinfectants. At the same time, Malhan said, the type of space in question is an important consideration. “A hospital is fairly predictable and organized, with enough floor space for a robot to move through it. Conversely, consider a movie theater, which has steps and narrow corridors. These types of spaces could be more challenging for a robot.”
The team said though smaller spaces could be hard to navigate, the robot is incredibly customizable. Changing the size of the mobile base or the robotic arm could help achieve more maneuverability or extended reach. Different types of grippers—which could be 3-D printed on demand—for instance a suction gripper, can also help depending on what types of items need to be grasped and moved, Kim said.
Journey to Deployment
For the ADAMMS robot to be effectively deployed to hospitals, offices and other critical spaces, first the user interface needs to be accessible through a diverse array of devices, like mobile phones and tablets, and made more user-friendly, Kim said.
In an ideal world, the team hopes the robot can be completely remotely operated—perhaps by a human in a different city or even country. “Someone sitting in the U.S. could disinfect a space in India or China, when it’s night there,” Thakar said. He also sees it as an opportunity to create jobs safely. “If we can easily and quickly train people to use this robot, people can remain in the safety of their homes while helping to make other spaces safe as well.”
Beyond the hospital, the researchers want to see the robot deployed for spaces like grocery stores, where disinfecting every nook and cranny is too labor-intensive for already overworked employees. There’s also hope, for surfaces that don’t respond to UV disinfection, that the robot could be deployed in other ways, for example, integrating a disinfection liquid into its build and having it spray the substance in a controlled way.
Said Thakar: “Ideally we want the robot to be used in the way people want it to be used. It’s very flexible and can be adapted to whatever needs are presented.”
Published on April 13th, 2020
Last updated on February 11th, 2021