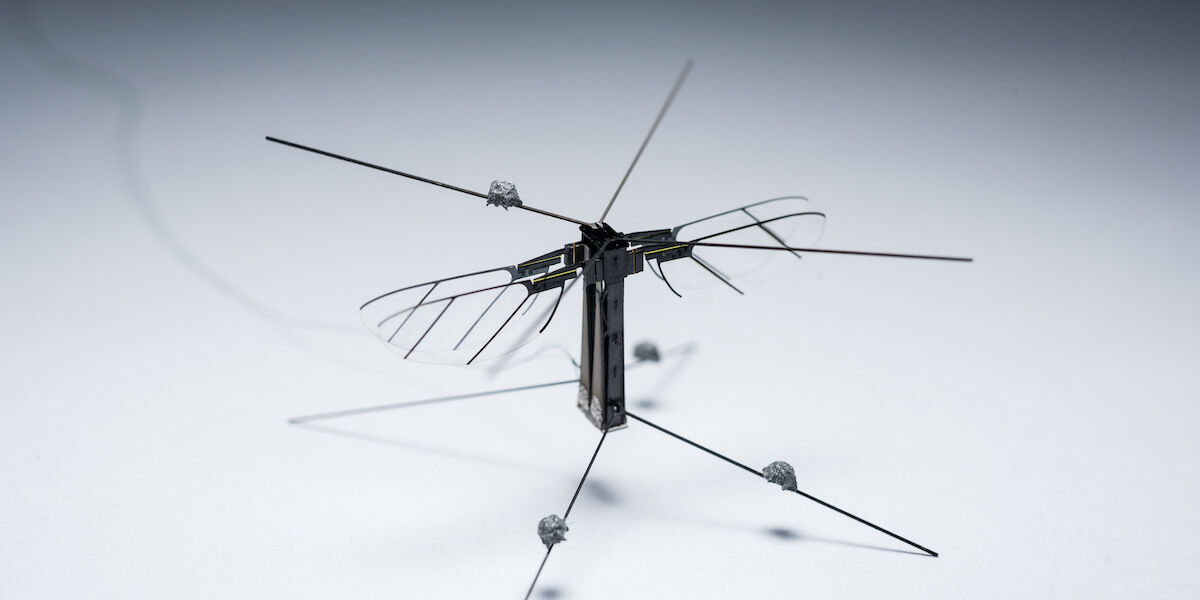
Bee+, a 95 mg four-winged robotic insect prototype designed by the Autonomous Microrobotic Systems Laboratory. PHOTO/Nestor Pérez-Arancibia.
Next time you pass a flying insect, take a moment to appreciate its structure. With a body that’s fairly heavy compared to its thin, delicate wings, this insect will fly with grace, fluidity and control. While this is an intrinsic aspect of an insect’s natural anatomical design, it’s very difficult to achieve this perfect balance of elements when replicating it in a robotic version.
In work that resulted in a best paper nomination by the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), USC Viterbi researchers achieved this balance. The research team, members of the Autonomous Microrobotic Systems Laboratory (AMSL), designed the first four-winged robotic insect weighing less than 100mg. At 95mg, this prototype, Bee+, features a new type of actuator that weighs half as much as the prior state-of-the-art piezoelectric actuator—one that transforms electrical energy into a mechanical displacement or stress.
The research team is led by Néstor O. Pérez-Arancibia, Assistant Professor in the USC Viterbi Department of Aerospace and Mechanical Engineering (AME) and includes AME PhD candidates Xiufeng Yang and Ariel A. Calderón, as well as recent AMSL PhD graduates Ying Chen and Longlong Chang.
“This new actuator and a new robotic configuration enabled us to integrate four wings inside the same envelope as that of the prior two-winged prototype,” said Pérez-Arancibia. “The individual areas of expertise of the participant PhD students reflect the multidisciplinary nature and complexity of the research effort that resulted in the reported innovation: Xiufeng is an expert on robotic design; Ying is an expert on control and dynamics; Longlong is an expert on aerodynamics; and Ariel is on expert on fabrication. Together, we were able to make an incredible breakthrough.”
It also enabled the researchers to break the world record of lift-to-weight ratio for flying robots at this scale. Bee+ demonstrates improved controllability and potentially longer life span over predecessors, like the 75-mg RoboBee created seven years ago by a team of Harvard researchers that included Pérez-Arancibia.
Members of the Autonomous Microrobotics Systems Laboratory, led by Néstor O. Pérez-Arancibia. PHOTO/Néstor O. Pérez-Arancibia.
Next up, the lab is working on creating the first fully autonomous (in terms of control and power) sub-gram flying robot.
Held in Macau, China from November 4-8, 2019, the IROS conference is one of the leading conferences on robotics in the world. Over 2,500 papers from 53 countries were submitted. The paper on Bee+ was one of four finalists for the IROS 2019 Best Paper Award and was simultaneously accepted for publication in the journal IEEE Robotics and Automation Letters. To read more about the Bee+, please see here.
Published on November 22nd, 2019
Last updated on November 25th, 2019