Quan Nguyen is a new faculty hire conducting novel research on robot mobility. Image Courtesy of Quan Nguyen.
Robots can be designed to move in a variety of ways: flying through the air, diving underwater or rolling on wheels.
Quan Nguyen, a new faculty researcher at the USC Viterbi School of Engineering, is programming robots that move in a different way: by walking, climbing, and jumping using legs.
Nguyen, who began as an assistant professor of aerospace and mechanical engineering in fall 2019, believes that legged robots are valuable because of their unique advantage to navigate difficult environments. This ability could be used to help and replace humans in dangerous jobs.
“Legged robots have a great potential to help humans in many dangerous jobs such as firefighting, disaster response, earth or space exploration, inspections in construction sites or offshore platforms,” Nguyen said. “So not only can this research improve our quality of life, it also has the potential to save many human lives.”
Nguyen’s lab uses quadruped robots, which have four legs, and bipedal robots, which have two legs. His research focuses on improving the agility and locomotion of these robots so they can efficiently and reliably navigate challenging terrain. To accomplish this goal, Nguyen and his team use control algorithms and machine learning techniques. Nguyen’s robots can walk over rough terrain, climb up and down stairs, and even jump on obstacles as high as a desk.
In a burning or collapsed building, legged robots could climb stairs and navigate through debris and obstacles to help fight the fire and search for and rescue humans trapped inside. Nguyen’s work on collaborative legged robots even pictures a scenario in which several robots could work together to clear heavy obstacles and carry humans to safety. In space exploration, deploying a robot is much cheaper and much safer than deploying a human. Legged robots could explore a greater range of terrain on other planets, from mountains to caves, compared to wheeled robots like the Mars rovers, he said.
The accomplishments of Nguyen’s research include the first ever successful experiment of bipedal robots walking dynamically over stepping stones of different heights and the highest obstacle jumping experiment for a quadruped robot, in which Nguyen and his team successfully programmed a 100-pound robot to leap onto a 30-inch-tall desk.
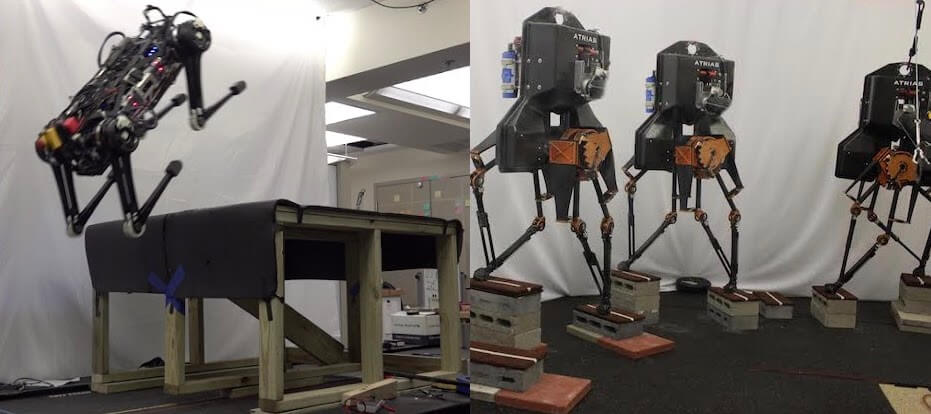
Nguyen’s lab has successfully programmed both quadruped and bipedal robots to overcome mobility milestones. Image Courtesy of Quan Nguyen.
“Legged robots have the potential to complete agile and dangerous tasks that humans must currently often perform,” said Guillaume Bellegarda, a postdoctoral research associate who works in Nguyen’s lab. “By putting the robot in harm’s way instead of humans, we avoid or mitigate any potentially dangerous situations for human workers.”
Nguyen is passionate about programming robots to deploy them on dangerous missions, but this isn’t the only application of his research. He believes, for example, his work could provide insight into the future development of improved prosthetic limbs for humans. As he conducts research with the goal of improving and refining control over the movements of robot limbs, he hopes that his control algorithms could have positive impacts on the mobility of those with disabilities who rely on prosthetics to walk. Robotic prosthetic legs use a similar control approach to robotic bipedal robots, so as Nguyen works to improve algorithms for controlling legged robots, his research could be used to improve the algorithms that control prosthetic legs.
Nguyen’s interest in robotics began at a young age. He was always fascinated by how things worked, especially complex machines like humanoid robots.
“The more I learn about robotics, the more I realize that there are many interesting challenges and meaningful applications in the field,” Nguyen said.
Nguyen graduated from Carnegie Mellon University in 2017 with a Ph.D. in mechanical engineering and an award for Best Dissertation. He worked as a postdoctoral associate in the Biomimetic Robotics Lab at the Massachusetts Institute of Technology for a year and a half before coming to USC in 2019.
Nguyen said he is excited to teach at USC because he wants to inspire students to find their own passions.
“As a professor, my goal is to make an impact and to change the world through research and education,” Nguyen said. “I hope that one day my research and my students can contribute to help robots become practically useful in many meaningful jobs in the future.”
Published on August 4th, 2020
Last updated on April 8th, 2021