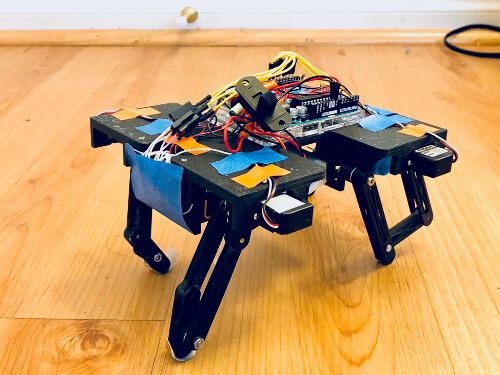
A four-legged robot inspired by the motion of a cat. Made by undergraduate students Daiming Yang, Chenchen Huang and Shijing Lu. Photo/Daiming Yang
From walking to slithering, or flying to swimming, animals are able to move and interact with their environment with relative ease. However, building a robot with the same capabilities is much more difficult.
“Roboticists watch creatures in the natural world with a great deal of envy,” said Satyandra “S.K.” Gupta, who holds a Smith International Professorship in Mechanical Engineering, is the associate department chair for the Department of Aerospace and Mechanical Engineering (AME) and the director of the Center for Advanced Manufacturing. “Taking inspiration from nature offers new possibilities for realizing novel robots. As such, bio-inspired robotics has emerged as an important specialization within the field of robotics.”
By mimicking natural movements, these creature-like robots can go where traditional robots cannot, like the difficult terrain of disaster sites. They can be used to save lives, improve security or explore remote locations. In addition, adapting biological attributes can lead to more robust or energy efficient robots.
AME 499 Special Topics: Biologically Inspired Robotics
In this undergraduate course, taught by Gupta, students looked to nature for new possibilities in robotic design. After learning about the fundamentals of traditional robotics and the role of biologically inspired design, students were tasked with building and programming their very own robot based on the movements of animals.
Daiming Yang, Chenchen Huang and Shijing Lu chose to build a four-legged robot that mimics the movement of a cat. “Unlike dogs or horses, cats walk with their front legs bent forward rather than backward, which may create “singularities” in robotic motion analysis,” said Yang.
Another team, decided to create a robot that walked sideways like a crab.
“Our team tried to capture the passively stable dynamics (series of falls) that crabs make when they walk slowly,” said Pamela Denny, whose teammates included Mary Bessell and Yan Zhang. “The most difficult task was putting the robot together and removing all the friction from the joints. This was a very detailed and complex task as there were 12 joints to set, align and adjust.”
On April 27, the nine teams presented their projects to the class and demonstrated their robot’s unique ability. By walking, crawling or side-stepping, each robot made its way down a track 30 times longer than the length of its body, signifying the success of a semester-long effort.
“Our team was so happy to create a crab that actually worked,” said Denny. “It was a lot of fun and I highly recommend the class!”
For a look at their creations in action, watch the following video:
Published on May 21st, 2018
Last updated on October 13th, 2025