


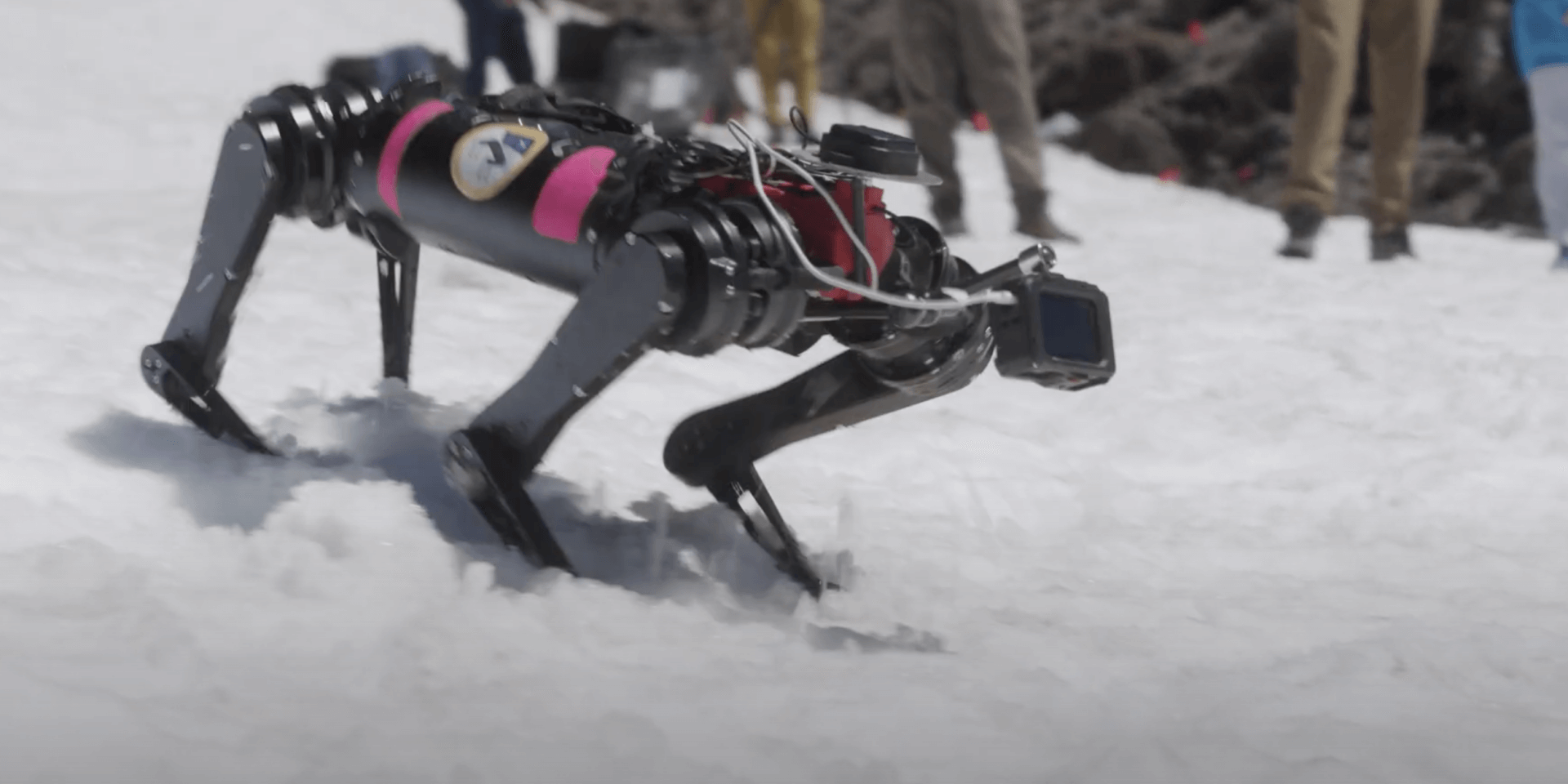
A still from the LASSIE Project video, taken at Mount Hood, Oregon.
The Palmer Glacier on Oregon’s Mount Hood isn’t the moon, but it’s a good place to practice.
Some 6,000 feet up the snow-capped mountain, located about 70 miles east of Portland, a multi-disciplinary team from the University of Southern California, Texas A&M University, Georgia Institute of Technology, Oregon State University, Temple University, the University of Pennsylvania, and NASA gathered to turn loose a four-legged robot named Spirit into the wild.
The team that included engineers, cognitive scientists, geoscientists and planetary scientists field-tested Spirit as part of the LASSIE Project: Legged Autonomous Surface Science in Analog Environments. Spirit covered a variety of challenging terrains, using his spindly metal legs to amble over, across and over around shifting dirt, slushy snow and boulders during five days of testing in summer 2023. Sometimes he expertly traversed the hillside, while at other moments he teetered and fell over. All part of the process to better understand the substrate properties and learn to better walk on these extreme terrains. The practice time Spirit logged produced data that will be used to train future robots for use on intergalactic surfaces, like earth’s moon and perhaps planets in our solar system.
“A legged robot needs to be able to detect what is happening when it interacts with the ground underneath, and rapidly adjust its locomotion strategies accordingly,” said Feifei Qian, an assistant professor of electrical and computer engineering at the USC Viterbi School of Engineering and School of Advanced Computing, which is leading the project funded by NASA. “When the robot leg slips on ice or sinks into soft snow, it inspires us to look for new principles and strategies that can push the boundary of human knowledge and enable new technology. We learn and improve from the observed failures.”
Watch this 5-minute video produced for the team by documentary filmmaker Sean Grasso:
Spirit learns from every step.
“Similar to the way that when we walk on uneven surfaces as humans, we can sort of detect how the ground is shifting beneath our feet, a legged robot is capable of the exact same thing,” said Cristina Wilson, a cognitive scientist at Oregon State University.
The more machines the merrier
Feifei Qian – (Photo Courtesy of Feifei Qian)
Qian’s group doesn’t intend to stop at just one robot, wandering the wilderness alone. She and her former colleagues at Penn, Cynthia Sung, Mark Yim, Daniel Koditschek, and Douglas Jerolmack, received a two-year $2 million grant from NASA they’re calling the TRUSSES Project: Temporarily, Robots Unite to Surmount Sandy Entrapments, Then Separate. They want to help the space agency put teams of robots on the moon and have them work together on tasks. They would take the knowledge they came in with, and the data they collect on the mission, and communicate those details to each other.
“They would sense how the ground conditions are,” Qian said, “and then exchange that information with one another, and collectively form a map of locomotion risk estimation. The team of robots can then use this traversal risk map to inform their planetary explorations: ‘There is an extremely soft sand patch that might be high-risk for wheeled rovers. Come over here, this might be a safer area.’ ”
The robots in mind for this kind of work would be more than just Spirit: There would be a wheeled rover (great for payload and long distances), a Hexapedal robot (intermediate payload but better mobility than the wheeled), and dog-like ones like the rugged version of Spirit (highest mobility, shorter distances). And here’s the coolest part of that research, the part that sounds like something the Transformers would do. Or at least a team of castaways on “Survivor”: If one got in a jam, made immovable by loose dirt or a rock or a ravine, his bot-mates would arrive and link together and form a bridge, or a pyramid, to hoist their pal to safety. And then back to work.
“When they plan for the strategy to pull the robot up, they’ll decide what force to exert and what position the robot should go to, while also compiling the terrain information,” Qian said. “That’s the key idea of how to use these capabilities: to both prevent and recover from locomotion failures in extreme terrain.”
Back to Mount Hood
Spirit gets around a variety of natural environments, to learn how to better move on challenging terrains. Qian has let him off his leash on Southern California beaches, and the multi-university team has field-tested him in the soft granules of White Sands National Park in New Mexico. But the video shot at Mount Hood shows just how otherworldly that landscape can be in these planetary-analogue environments. This provides Spirit with plenty of opportunities to learn on earth, before potentially exploring other planets.
“You look around us, it would be very hard to drive up this,” Ryan Ewing, a geologist from NASA Johnson Space Center, says in the video. “But as a legged being, as humans, we can step around it easily. A dog could walk around it easily. So this project is the proving ground that we can enable new science and new mobility on environments that are like other planets.”
In fact, a dog is indeed frisking about: Howard, Wilson’s German shepherd, wandered about, with the kind of agility Spirit could only dream of.
“We are going to observe how Howard moves in different types of snow and ice conditions,” Qian says in the video. “What exactly, out of those combined motions, allows him to succeed on challenging terrain?”
The LASSIE Project calls for two more trips for Spirit: to Mount Hood this summer, and to White Sands next year. The TRUSSES team, from USC and Penn, also plans to visit White Sands next year with Spirit and the other, new, multi-tasking robots. Imagine WALL-E with friends.
—
The NASA PSTAR (Planetary Science and Technology Through Analog Research) number for this project is 80NSSC22K1313.
Published on April 3rd, 2024
Last updated on April 4th, 2024








