New SINGO connector.
Wei-Min Shen returned from the 26th Army Science Conference with an award plaque for research which created a improved linkage system for his SuperBot modular robots
The Conference, held in Orlando Florida, was on the theme of “Transformational Army Science and Technology – Harnessing Disruptive Science and Technology for the Soldier.”Shen’s paper, “Self-Reconfigurable Robots for Adaptive and Multifunctional Tasks,” was judged the best in its category, “Autonomous/Unmanned Systems”
 The paper discusses the latest improvements in his SuperBot system, in which identical modular robotic units meld together into different shapes for different functions.
The paper discusses the latest improvements in his SuperBot system, in which identical modular robotic units meld together into different shapes for different functions.
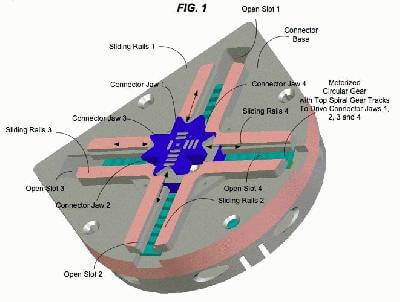
Shen (photo at right) directs the Polymorphic Robotics Laboratory, which has been developing the SuperBots and predecessor modular systems since 2001. The Orlando presentation focused on new work on the critical job of linking modules, describing in detail a new SINGO ( “Single End Operative”) connector.
According to Shen, “most existing connection mechanisms suffer from a deficiency that a connection would seize itself if one end malfunctions or is out of service. To mitigate this limitation on self-healing, this paper presents a new SINGO connector that can establish or disengage a connection even if one end of the connection is not operational.”
“This is necessary because components in a system may be unexpectedly damaged or deliberately taken out of service, yet the process of self-organization must go on. In other words, no connections should be seized permanently or disconnect unintentionally.”.

Linkage: The prototype connectors are designed so that they can be seamlessly integrated with the existing SuperBot modules. The image shows SINGO units installed on the ends of two modules.Click here to see movie of the modules connecting.
According to Shen’s presentation, “the unique features of this connector include the genderless (homogeneous) structure, strong and accurate mechanical linkage, long endurance, thin profile, compliant for misalignment, power efficient, supporting communication, docking guidance, and offers the possibility for sharing power.
“Theoretical analysis and experimental results have shown that this new connector can be seamlessly integrated with an existing self-reconfigurable robot, and can perform the desired compliance, speed, accuracy, flexibility, efficiency, and endurance. These features provide strong evidence for this new connection mechanism to be useful in many real-world applications.”
Published on December 5th, 2008
Last updated on August 5th, 2021